Dove nessun robot è mai giunto prima
Robot esploratori capaci di raggiungere luoghi inaccessibili agli umani e raccogliere dati preziosi per conoscere ambienti ancora avvolti dal mistero.
Al giorno d’oggi siamo in grado di viaggiare nello spazio ed esplorare satelliti e pianeti vicini del sistema solare, ma esistono ancora molti luoghi – sul nostro stesso pianeta – non accessibili perché troppo pericolosi o troppo ardui da raggiungere, a causa delle temperature troppo basse (o troppo elevate) o di altre avversità come la presenza di gas tossici o esplosivi, o ancora accessi troppo impervi o non raggiungibili da operatori umani.
Nessun di questi problemi però è insormontabile, soprattutto quando si decide di chiamare in soccorso una disciplina che sta sperimentando nell’ultimo quinquennio dei tassi di crescita e sviluppo tecnologico davvero impressionanti: la robotica.
Robot esploratori: caratteristiche e applicazioni
Gran parte delle macchine e dei robot attualmente utilizzati per applicazioni standard o più tradizionali, come l’ambito industriale, generalmente lavora sotto il controllo e la supervisione umana, limitandosi ad eseguire alcuni task preprogrammati.
Tuttavia, quando occorre spingersi in regioni non accessibili, i robot devono essere in grado di eseguire i loro compiti sostanzialmente in autonomia, necessitando pertanto di complessi sistemi di sensori e algoritmica sofisticata, che consentano loro di non ‘smarrire la strada’ durante una missione ed essere in grado, eventualmente, di aggirare ostacoli imprevisti o di fronteggiare situazioni critiche senza l’assistenza degli operatori umani.
Naturalmente, quanto maggiore è la capacità dei team di ricerca di prevedere possibili criticità, tanto più robuste risulteranno la progettazione e la realizzazione delle macchine, incrementando significativamente le chances di portare a termine la missione esplorativa e di consegnare la preziosa quantità di dati acquisiti sugli ambienti ostili, la cui tipologia può essere decisamente variegata: dall’interno dei vulcani, alle profondità degli oceani o delle viscere della Terra.
Robot speleologi
La speleologia è la disciplina che studia la costituzione di cavità sotterranee naturali e si avvale della competenza e dell’esperienza di personale specializzato, in grado di penetrare negli anfratti e raccogliere campioni sia biologici che minerali. Tra gli obiettivi della ricerca, oltre ad aggiungere una maggiore consapevolezza sui meccanismi di formazione delle cavità stesse, c’è il determinare se è possibile sfruttare le cavità per realizzare un sito di estrazione mineraria. Sfortunatamente, molti anfratti sono spesso troppo stretti o difficoltosi per consentire l’accesso anche al più abile degli speleologi umani.
Per aggirare l’ostacolo, l’Istituto Tecnologico Vale di Minas Gerais in Brasile – finito sotto i riflettori qualche tempo fa per l’incidente della diga di Brumadinho – , ha messo a punto nel 2015 il primo robot in grado di supportare le spedizioni speleologiche, progettato appunto per accedere ai varchi troppo stretti o impervi per il personale.

L’automa è munito di scanner laser tridimensionale, di fotocamere ad alta risoluzione e di un sistema di illuminazione che lo rendono in grado di acquisire e trasmettere in tempo reale le immagini dell’ambiente sotterraneo, e può essere sia guidato in remoto che eseguire operazioni autonome.
Infine, la stessa architettura di locomozione del robot è adattabile, potendo contare sia su un sistema di quattro ruote che su una coppia di bracci artificiali, che lo rendono particolarmente flessibile anche su differenti tipi di terreno: caratteristiche simili, seppur in ambiti differenti, a quelle di un automa già descritto in passato su queste pagine: Robonaut.
Rettili robotici salvifici
OggiScienza ha già affrontato in passato il tema degli insetti robotici, utilizzabili per identificare la posizione di potenziali vittime rimaste intrappolate in ambienti angusti a seguito di incidenti o eventi catastrofici come i disastri naturali.
La ricerca in questo ambito non si è di certo arrestata: ne è un esempio notevole il serpente robotico sviluppato nei laboratori di Biorobotica della Carnegie Mellon University Biorobotics Laboratory, e utilizzato nelle attività di ricerca e recupero a seguito dello spaventoso terremoto di Mexico City, nel 2017.

In effetti, come sperimentato dai ricercatori, ispirarsi alle caratteristiche di organismi viventi che strisciano – anziché utilizzare arti per muoversi nello spazio – può consentire di progettare automi molto più adattabili in situazioni in cui la presenza di braccia o zampe può comporre difficoltà aggiuntive nei movimenti: è, il caso, appunto, della necessità di intrufolarsi in ambienti molto angusti alla ricerca di sopravvissuti.
Dagli oceani allo spazio profondo
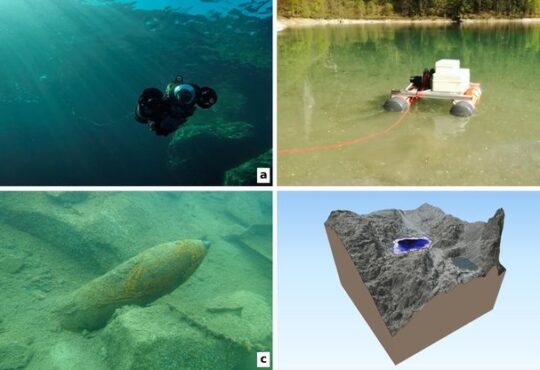
Passando ad altra applicazione, l’esplorazione dei fondali oceanici è da sempre un argomento di grande fascino scientifico e letterario. Con la differenza fondamentale che gli emuli contemporanei del geniale capitano Nemo e dei suoi ardimentosi compagni di avventure sono sempre più spesso avanzate flotte di robot subacquei.
Un esempio, oltre al progetto italiano Sushi Drop, è il recente progetto SUBSEA (Systematic Underwater Biogeochemical Science and Exploration Analog) della NASA, che utilizza sistemi robotici per esplorare da vicino un vulcano subacqueo localizzato nei pressi delle coste hawaiane. Lo scopo principale è raccogliere informazioni di natura geologica, biologica e chimica, non solo per mappare le caratteristiche della stessa regione, ma soprattutto perché secondo gli studiosi analizzare le condizioni estreme in cui gli organismi riescono a sopravvivere sulla Terra aiuterà a comprendere se in ambienti ritenuti simili, come Encelado, una luna di Saturno, possano celarsi forme di vita extraterrestri.
Anguille robotiche
Restando al tema dei robot subacquei, è importante sottolineare che le tecnologie impiegate per la realizzazione degli automi devono garantire una sufficiente autonomia e preservare l’integrità anche in ambienti ostili o inaccessibili: caratteristiche non sempre ottenibili con una progettazione tradizionale, basata ad esempio su apparati di locomozione elettrici o elettronici.
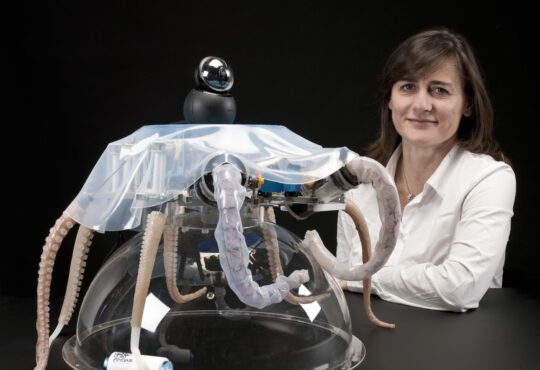
Un altro esempio davvero notevole di applicazione innovativa è, in tal senso, il robot anguilla sviluppato da un team congiunto di biologi e ingegneri dell’Università della California – San Diego che, in luogo di motori elettrici, sfrutta per muoversi una struttura flessibile e muscoli artificiali. Più precisamente si tratta di attuatori ad elastomeri dielettrici (DEA – Dielectric Elastomer Actuator), superfici di materiale polimerico in grado di subire elevate deformazioni elastiche se soggette a tensioni elettriche, generate da un circuito di pilotaggio.

Le caratteristiche più importanti dei DEA, oltre alla estrema deformabilità, sono un’elevata rapidità di risposta ai segnali elettrici di controllo e, soprattutto, un costo ed una rumorosità significativamente ridotti, che li rendono ideali per la realizzazione di apparati non invasivi per l’ambiente circostante, laddove i motori elettrici e la struttura rigida dei robot subacquei standard possono spesso turbare la quiete delle creature che abitano i fondali marini, o addirittura arrecare loro danno.
Dentro i vulcani
L’ultimo scenario di questa carrellata è uno dei più pericolosi ed ostili: parliamo delle viscere dei vulcani, nella maggior parte dei casi del tutto inaccessibili ad operatori umani, a causa della ridotta dimensione degli interstizi e delle elevate temperature. Tuttavia, è di fondamentale importanza acquisire informazioni e dati all’interno dei vulcani, per ricostruirne in modo più accurato le caratteristiche geologiche ed elaborare modelli più dettagliati dei meccanismi che determinano le eruzioni.
Su questo tema, è da segnalare un altro progetto della NASA, risalente al 2015, e seguito principalmente da Carolyn Parcheta, una ricercatrice del JPL che ha contribuito a sviluppare una nuova generazione di robot esploratori da impiegare nei vulcani delle isole Hawaii: i VolcanoBot, dotati di una elevata resistenza alle alte temperature e di dimensioni ridotte, in grado di trasmettere in modo continuo ed affidabile i dati acquisiti ad una centrale remota.

Grazie alla esperienza con i VolcanoBot, Carolyn Parcheta ha proseguito la sua attività di monitoraggio delle eruzioni, come quella del Kilauea, verificatasi nel maggio 2018.
Leggi anche: Gli effetti dei cambiamenti climatici sugli oceani
Articolo pubblicato con licenza Creative Commons Attribuzione-Non opere derivate 2.5 Italia. ![]()