La Robodissea: quando nello spazio ci vanno i robot
La possibilità di manovrare robot con precisione alla distanza Terra-spazio conferma l'ipotesi di utilizzare queste macchine nell'esplorazione spaziale

FUTURO – Spazio, ultima frontiera. Questo l’incipit di Star Trek, una delle più fortunate serie dedicate all’esplorazione di nuovi mondi. Nell’immaginario collettivo, la realizzazione degli obiettivi più ambiziosi di questa affascinante ricerca, come raggiungere Marte o i confini del sistema solare, ha come prerequisito lo sviluppo di sofisticati e avveniristici mezzi di trasporto, che consentano di coprire le distanze siderali in tempi compatibili con la durata della vita umana. Come la nave stellare Enterprise, per esempio.
Ma non fossero gli esseri umani i protagonisti diretti di questi viaggi spaziali?
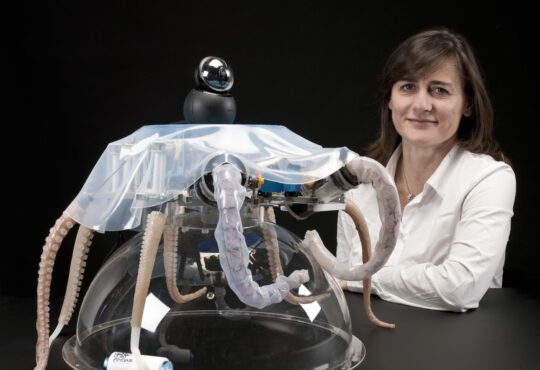
Sta esplorando questa possibilità l’ESA, l’Agenzia Spaziale Europea, che ha sviluppato, in collaborazione con il TU Delft Robotics Institute, un complesso sistema per controllare robot sulla Terra, nel progetto Interact.
Il gruppo di ricerca dell’ESA ha condotto una serie di test in cui Andreas Mogensen, un astronauta della ISS (International Space Station), la stazione spaziale orbitante, ha controllato da remoto il rover Interact Centaur sulla Terra. Direttamente dallo spazio.
A rendere ancora più suggestivo questo esperimento è stato l’utilizzo di una cosiddetta interfaccia aptica, ossia un sistema in grado di riprodurre le sensazioni tattili, e di farle sperimentare all’astronauta durante il controllo remoto delle macchine. In altri termini, Mogensen è stato in grado di percepire ciò che gli automi toccavano, come se i loro arti robotici fossero un prolungamento delle sue mani.
Com’è facile immaginare, l’impatto potenziale di tecnologie di questo genere è enorme, e ne risulta radicalmente sconvolto il punto di vista classico sull’esplorazione spaziale, che vede gli umani come attori fisicamente coinvolti.
Lo sviluppo e il potenziamento di interfacce, sistemi di telecomunicazione e controllo remoto utilizzati per vedere o, addirittura, “toccare” oggetti su pianeti lontani, utilizzando avatar robotici è, di fatto, una frontiera che fino a pochi anni fa sarebbe stata troppo ambiziosa persino per la più ardita cinematografia di fantascienza.
Eppure l’impiego di robot avanzati nell’esplorazione dello spazio è già da diversi anni parte integrante di ambiziosi programmi dell’ESA e della NASA.
Un esempio notevole è Robonaut, un robot umanoide progettato da DARPA e NASA per eseguire attività extraveicolari nello spazio. In altre parole Robonaut può eseguire una camminata spaziale al di fuori della navicella che lo ospita, ed è dotato di una destrezza superiore a quella di un essere umano, che gli consente di effettuare riparazioni o condurre verifiche sulla superficie di corpi celesti. O ancora Spidernaut, un robot ispirato agli aracnidi dotato di forza e agilità elevate, e per questo particolarmente adatto all’esplorazione di superficie dissestate e caratterizzate da pendii e salite estreme. Come il suolo di Marte, per esempio.
In effetti questo traguardo pare non molto remoto, a giudicare da quanto ha sostenuto, durante il meeting della Royal Aeronautical Society di Londra, lo stesso Elon Musk, fondatore di SpaceX, altra grande realtà del panorama dell’esplorazione spaziale: “Saranno necessarie milioni di persone per una colonia su Marte, per cui 80 000 è soltanto il numero di persone inviate su Marte ogni anno. So bene che può sembrare una follia. Non sono diventato pazzo, e nemmeno credo che la SpaceX possa fare tutto questo da sola. Ma se l’umanità spera di diventare una specie multi-planetaria, dobbiamo trovare un modo per spostare milioni di persone su Marte”.
E chissà che stavolta l’Ulisse capace di varcare per primo le colonne d’Ercole ai confini del cosmo non sarà, anziché un essere umano, una sua avanzata, robotica creazione.
Leggi anche: Scimpanzé, oranghi e (in futuro) robot: quali diritti devono avere?
Pubblicato con licenza Creative Commons Attribuzione-Non opere derivate 2.5 Italia. ![]()
Crediti immagine: ESA