Barbara Mazzolai e Cecilia Laschi: le donne italiane della robotica
Due ricercatrici italiane tra le 25 donne geniali della robotica secondo la comunità RoboHub.

RICERCA – RoboHub, la più grande comunità scientifica di esperti di robotica, le ha inserite nella lista delle 25 donne geniali del 2015. Sono loro, Barbara Mazzolai dell’Istituto Italiano di Tecnologia e Cecilia Laschi della Scuola Superiore Sant’Anna di Pisa, le eccellenze italiane al femminile nel campo della robotica. Tutte le donne che hanno ottenuto il riconoscimento, conferito “per la resilienza, per la perseveranza e per la pura genialità che hanno dovuto dimostrare per arrivare al top del loro particolare settore”, si occupano di ricerche avveniristiche e, per molti aspetti, sono delle pioniere. Tra le altre, Propa Ghosh, la prima donna statunitense a capo di un reparto di Chirurgia robotica, premiata per la grande capacità di combinare le competenze mediche alle innovazioni in campo tecnologico; e Stéphanie Lacour, docente dell’Ecole Polytechnique Fédérale di Losanna, che sta progettando una pelle umana artificiale dotata di circuiti intergrati e capace di comunicare in modo diretto con il sistema nervoso. Così come le colleghe, anche le scienziate italiane si sono distinte per le loro ricerche di frontiera. Mazzolai e Laschi, nello specifico, si occupano di soft robotics, un’evoluzione nel campo della robotica che prevede l’impiego di materiali non rigidi ma “soft” per sviluppare una nuova generazione di robot.
Plantoid, il primo robot al mondo ispirato alle piante
Barbara Mazzolai, direttrice del Center for Micro-BioRobotics dell’Istituto Italiano di Tecnologia, con sede a Pontedera (Pisa), dal 2006 lavora alla realizzazione di robot plantoidi, delle macchine che imitano il comportamento e le attitudini delle piante sfruttandone i vantaggi. “L’obiettivo iniziale era quello di progettare un robot per l’esplorazione del suolo”, racconta Mazzolai. “Abbiamo creato dapprima sensori per il monitoraggio dell’ambiente e in seguito anche robot, ma volevamo fare di più”. La ricercatrice, che di formazione è biologa e conosce a fondo il mondo vegetale, ha un’idea. “Ho pensato al comportamento delle radici, al modo in cui sono strutturate. La parte terminale, l’apice radicale, possiede dei sensori in grado di analizzare il terreno e di modulare, in base alle necessità, la direzione e la quantità di crescita della radice stessa. Mi è sembrato fin da subito un modello perfetto.” Così Mazzolai e il suo team si mettono all’opera e danno vita al nuovo robot-esploratore, che ha una struttura molto particolare.

Il plantoide si compone di un tronco al quale sono collegate cinque braccia (le radici artificiali), che gli consentono di muoversi e di testare la qualità del terreno circostante. Il tronco custodisce la parte elettronica della macchina e un rocchetto di Pla, un materiale termoplastico di solito impiegato nei processi di stampa 3D industriale. Le radici artificiali del robot sono simili per struttura a quelle delle piante. Sono formate da una parte mobile, in grado di crescere, e da un parte fissa dotata di sensori: l’apice radicale. Quest’ultima governa il comportamento della radice ed è in grado di scandagliare a fondo il terreno. Possiede dei sensori di tatto, che gli consentono di evitare gli ostacoli, di umidità, in grado di individuare la presenza di acqua, di gravità, che indicano al robot come spostarsi, di azoto, fosforo e potassio, per individuare i nutrienti nel terreno, e, in ultimo, di temperatura. “I dispositivi di analisi inseriti nel plantoide imitano alla perfezione quelli presenti nelle piante ma potrebbero anche essere diversi. Per esempio, si potrebbero inserire dei sensori per il rilevamento di radon o di metalli pesanti nel suolo”, ricorda Mazzolai, illustrando anche un’altra peculiarità del robot. “Le braccia del plantoide, se è necessario, possono crescere”. Un motore installato nella punta delle radici e collegato al rocchetto di Pla presente nel tronco “sfila” il materiale termoplastico e gli consente di depositarsi, strato su strato, a livello dell’apice radicale, aumentando la lunghezza della radice. Una funzione, questa, molto importante, poiché consente alla punta della radice di spingersi nel suolo riducendo le pressioni e gli attriti. Mazzolai, che si dice soddisfatta dei risultati ottenuti, ora vaglia nuove possibilità di applicazione della macchina: “Alcuni medici ci hanno suggerito di utilizzare la tecnologia del plantoide per creare moderni endoscopi, in grado di diminuire l’attrito e la pressione incontrati nel corpo umano proprio grazie alla capacità di espandersi a partire dalla punta. Endoscopi simili consentirebbero di limitare il dolore al quale sono sottoposti i pazienti durante gli esami invasivi come la colonscopia, e di ridurre il danneggiamento dei tessuti. Siamo ancora in fase di sperimentazione ma la prospettiva di passare dall’esplorazione del suolo all’ambito medico è entusiasmante.”
Audio tratto dall’intervista a Barbara Mazzolai, Iit
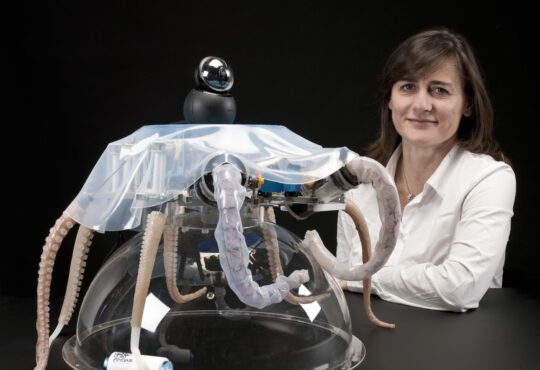
Il polpo-robot: l’innovazione della robotica nei tentacoli soft
Il futuro della robotica non passa solo dal mondo delle piante. Lo sa bene Cecilia Laschi, docente della Scuola Superiore Sant’Anna di Pisa, che deve il riconoscimento di RoboHub al suo impegno nella realizzazione del polpo-robot. “La mia ricerca parte da lontano ed è sempre stata orientata verso la robotica umanoide“, racconta Laschi, che da anni studia le caratteristiche del cervello umano con il sogno di poterle trasferire in un robot antropomorfo. Un’impresa per nulla semplice, come sottolinea la scienziata, che tra i limiti più grandi individua la rigidezza dei materiali impiegati per la realizzazione del corpo robotico. “Un robot dalla struttura rigida si rapporta con difficoltà sia con gli esseri umani sia con l’ambiente circostante. Siamo stati costretti a studiare un nuovo corpo fisico per le macchine e avevamo bisogno di un modello. Abbiamo pensato subito al polpo”. È il 2007 e l’avventura di Laschi parte da qui. Ottiene dei finanziamenti dalla Commissione europea e, insieme al suo team, inizia a studiare il polpo e la sua neurofisiologia. Ne osserva i movimenti, la struttura, la muscolatura. E si persuade sempre più dell’esemplarità del modello scelto: il polpo non ha parti rigide e, grazie ai suoi otto tentacoli, riesce ad avere un grande controllo suoi propri movimenti. La ricerca iniziale porta molti frutti. Il primo è Octopus, robot-soft che imita il polpo nella camminata e nella capacità prensile; poi è la volta di PoseiDRONE, polpo-robot dalle propaggini morbide in grado di spostarsi in acqua simulando la nuotata a getto pulsato del cefalopode.

Entrambi possono essere sfruttati nelle esplorazioni marine o per ripulire i fondali. Ma le applicazioni della ricerca di Laschi non si esauriscono qui. “Abbiamo creato un endoscopio a lunghezza variabile da impiegare in ambito chirurgico, e riprodotto le corde vocali umane per aiutare i medici nello studio della laringe. La soft robotics si adatta molto bene all’ambito biomedico. Inoltre, siamo riusciti a realizzare un braccio robotico che offre assistenza agli anziani sotto la doccia, l’I-Support”, racconta fiera Laschi, svelando i settori in cui trova applicazione la sua ricerca. Qual è, dunque, il materiale impiegato per costruire i robot-soft? “Il silicone si è dimostrato molto adatto ai nostri scopi. Ha un’elevata cedevolezza e poi è quello che, per densità, si avvicina di più al tessuto muscolare del polpo e ha proprietà meccaniche simili”, spiega la scienziata. Oltre al silicone, anche le fibre di Pet intrecciate sono state impiegate per realizzare le braccia prensili del polpo-robot. Laschi, che al momento è impegnata per lo più in ambito biomedico, conclude con una previsione sulle future applicazioni della propria ricerca: “Io sono convinta che la soft robotics possa essere utilizzata anche nella produzione industriale, che per ora rimane il regno dei robot tradizionali. Ci stiamo ancora lavorando ma ritengo che questo settore consenta grandi prospettive di applicazione.”
Audio tratto dall’intervista a Cecilia Laschi, Scuola superiore Sant’Anna, Pisa
Leggi anche: Medicina e robotica: le sfide e le possibilità
Pubblicato con licenza Creative Commons Attribuzione-Non opere derivate 2.5 Italia. ![]()
Crediti immagine: Scuola Universitaria Superiore Sant’Anna