Il senso del tatto per i robot del futuro
Riuscire a riprodurre il senso del tatto umano nei sensori artificiali può migliorare notevolmente le capacità cognitive dei robot, soprattutto in ambienti non strutturati.

Il tatto gioca un ruolo fondamentale in tutte le nostre attività e, anche se spesso lo diamo per scontato, ci affidiamo a lui tutti i giorni.
Le nostre mani sono piene di recettori tattili e c’è un feedback continuo tra ciò che tocchiamo, il cervello e il movimento delle mani che ci consente di gestire senza sforzo e con grande destrezza oggetti anche molto diversi tra loro.
Nel campo della robotica, la capacità di prendere gli oggetti, muoverli e manipolarli è estremamente importante in diverse applicazioni e il senso del tatto potrebbe migliorare molto il modo in cui i robot riconoscono e classificano gli oggetti, si auto-calibrano e si muovono. Lorenzo Jamone si occupa di robotica cognitiva alla Queen Mary University di Londra. Tra gli obiettivi della sua ricerca, c’è la messa a punto di sensori di tatto da integrare in sistemi robotici usati nello smantellamento di impianti nucleari e in campo musicale.
Nome: Lorenzo Jamone
Età: 39 anni
Nato a: Genova
Vivo a: Londra (Regno Unito)
Dottorato in: tecnologie umanoidi (Genova)
Ricerca: Regolazione della presa di oggetti con algoritmi di intelligenza artificiale
Istituto: Cognitive Robotics and Intelligent Systems for the People, Advanced Robotics, School of EECS, Queen Mary University of London
Interessi: suono la batteria, giochi (sia in termini di sport che da tavola)
Di Londra mi piace: i pub
Di Londra non mi piace: c’è troppa gente in centro il sabato pomeriggio
Pensiero: I gesti delle mani sono quelli dell’istinto: i più liberi, i più rapidi. (Renzo Piano)
Di cosa si occupa la robotica cognitiva?
La robotica cognitiva ha due obiettivi principali: prendere ispirazione dall’intelligenza biologica (umana, animale) per creare dei robot intelligenti, con una definizione di intelligenza ampia; e usare gli algoritmi robotici per supportare o stimolare teorie sull’intelligenza umana.
Nello specifico, il mio lavoro è concentrato sull’intelligenza delle mani. Ogni giorno usiamo le mani per fare cose che ci sembrano semplicissime ma che da un punto di vista robotico sono estremamente complesse. Il tatto gioca un ruolo fondamentale nelle nostre interazioni con l’ambiente, soprattutto se l’ambiente non è strutturato, cioè ha caratteristiche fisiche e geometriche non completamente note a priori.
Immaginiamo di voler scrivere: dobbiamo prendere una penna, stringerla in modo che non cada, rigirarla con le dita all’interno della mano e applicare una certa pressione sul foglio. Tipicamente quando afferriamo la penna abbiamo un’idea iniziale di peso, fragilità, scivolosità, ma è solo quando ce l’abbiamo in mano che l’idea iniziale si aggiorna e ci permette di compiere l’azione in maniera efficace.
Il nostro cervello rielabora tutte queste informazioni in maniera estremamente rapida ed efficace. Un robot le deve in qualche modo imparare.
Come si integra il senso nel tatto nei robot?
In parte creando sensori tattili ispirati alle conoscenze biologiche, in parte scrivendo algoritmi che permettono al computer di usare le informazioni ricevute dal sensore per ricreare nel robot un certo tipo di comportamento.
I sensori tattili che mettiamo a punto sono costituiti da un sensore magnetico e un magnete messi assieme all’interno di un materiale soffice capace di deformarsi. In condizioni di riposo, il magnete genera un campo magnetico che viene misurato dal sensore. Quando si applica una forza alla superficie del materiale, il magnete si sposta rispetto al sensore, il campo magnetico cambia e la variazione ci può dare una stima della forza e del tipo di contatto applicato alla superficie.
Ogni tocco genererà un segnale e tramite modelli di machine learning e intelligenza artificiale è possibile associare a ogni segnale un certo oggetto e un certo tipo di azione.
Che tipo di tocchi usate?
Cerchiamo di far afferrare al robot degli oggetti senza farli scivolare. Ma ai robot le cose cadono sempre! Ed è una questione molto importante: nell’uomo, quando un oggetto sta scivolando dalla presa, si creano dei fenomeni di stick-slip, in cui l’interazione tra polpastrello e oggetto cambia in modo repentino tra contatto e non contatto. Possiamo lavorare sullo scivolamento degli oggetti nei robot usando questa conoscenza biologica e cercando nei sensori qualcosa relativo alla frequenza del segnale.
Un oggetto molto difficile da far afferrare a un robot è la frutta. Al contrario degli oggetti creati dall’uomo, non si può stabilire un modello 3D preciso per la frutta. È vero che una banana avrà sempre un certo tipo di forma, ma poi ogni banana è diversa, in dimensioni e proprietà fisiche (dura/molle, liscia/rugosa). Inoltre la frutta è delicata da manipolare, non deve essere né schiacciata né rovinata.
In quale tipo di applicazioni si possono usare i robot con questi sensori tattili?
In uno dei nostri progetti ci proponiamo di usare i robot per entrare nelle centrali nucleari dismesse del Regno Unito ed esplorare ambienti con alti livelli di radiazioni in cui è meglio che gli esseri umani non vadano. Il robot deve perciò essere in grado di andare in giro e afferrare oggetti che non sono prettamente strutturati, perché non sappiamo a propri come sono fatti, se sono fragili, quanta forza serve per afferrarli senza romperli, se sono scivolosi.
Un altro progetto riguarda i robot per l’intrattenimento musicale. Quando sentiamo un ritmo e vogliamo sincronizzarci a esso, di solito iniziamo a battere le mani o picchiettare con le dita. È una tendenza naturale, alcune volte lo facciamo consciamente altre no perché è qualcosa che il nostro cervello usa per capire meglio quel ritmo.
Stiamo cercando di capire come funziona questa sincronizzazione nell’essere umano per poi applicarla a robot da usare nel campo dell’intrattenimento.
Quali sono le prospettive future del tuo lavoro?
Vogliamo insegnare ai robot a manipolare diversi oggetti sulla base di strategie prettamente umane. Per esempio, per prendere una carta di credito posta su un tavolo di solito usiamo il dito per farla scivolare e poi la afferriamo. Un robot, invece, la prende ai lati, stringe e solleva.
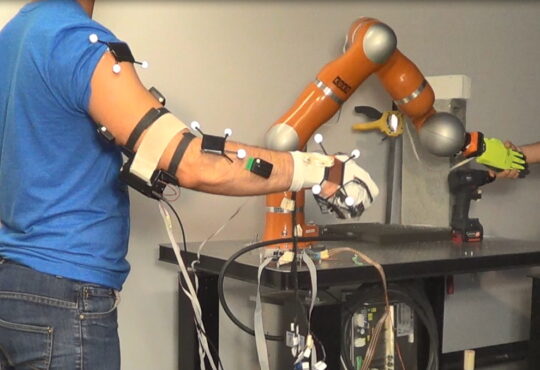
Per insegnare ai robot le “nostre” strategie, usiamo la teleoperazione con una persona che si muove e il robot che deve replicare movimenti, e facciamo in modo che il teleoperatore provi le stesse sensazioni del robot. Perciò, usiamo un caschetto per la realtà virtuale per far vedere alla persona ciò che il robot vede e dei guanti sensorizzati per sentire ciò che il robot sente quando tocca un oggetto.
Leggi anche: Covid-19, il ruolo della robotica durante una pandemia
Articolo pubblicato con licenza Creative Commons Attribuzione-Non opere derivate 2.5 Italia. ![]()