Umanoidi che imparano a muoversi come gli umani
I robot umanoidi sono molto versatili e intuitivi e hanno il potenziale per diventare avatar umani che operano a distanza in luoghi inaccessibili o pericolosi.
I continui progressi della robotica stanno suscitando un crescente interesse per le applicazioni in cui la vita umana è a rischio, come la ricognizione di zone contaminate, pericolose, remote, la ricerca e soccorso, l’esplorazione spaziale.
A seconda delle circostanze, i robot possono essere usati come avatar, estensioni fisiche dell’utente, o come collaboratori che si muovono sotto la supervisione di un operatore. La teleoperazione, cioè la possibilità di controllare manualmente un robot a distanza, è un’applicazione molto promettente in questo campo ma ci sono ancora diverse sfide da superare.
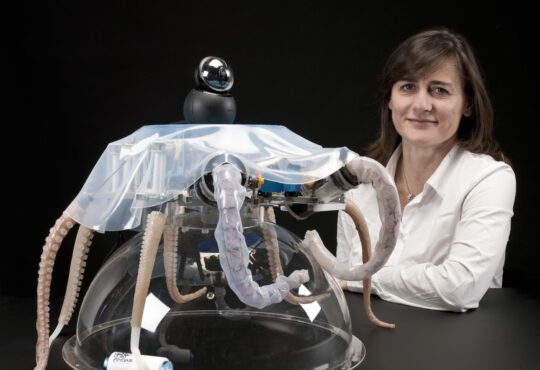
Serena Ivaldi si occupa di robotica e tecnologie umanoidi. La sua ricerca all’istituto INRIA Nancy-Grand Est (Francia) è focalizzata a migliorare i sistemi di teleoperazione affinché permettano un’interazione più efficace e collaborativa tra uomo e umanoide.
 Nome: Serena Ivaldi
Nome: Serena Ivaldi
Età: 39 anni
Nata a: Genova
Vivo a: Nancy (Francia)
Dottorato in: tecnologie umanoidi (Genova)
Ricerca: Controllo avanzato di umanoidi
Istituto: INRIA Nancy Grand-Est and LORIA (Francia)
Interessi: viaggiare, leggere libri, cucinare, film e serie tv di fantascienza
Di Nancy mi piace: a misura di famiglia, c’è molto verde, ci si muove in bici
Di Nancy non mi piace: non ha il mare
Pensiero: The most dangerous phrase in the English language is “we have always done it this way”. (Grace Hopper)
Qual è il vantaggio degli umanoidi?
Sono robot molto prossimi agli umani, hanno un corpo versatile che potenzialmente permette loro di fare tantissime attività e, grazie alla forma antropomorfa, è veramente intuitivo immaginare come controllarli. Tuttavia, sono piattaforme estremamente complesse, difficili da controllare, da gestire, da riparare, e sono molto costose.
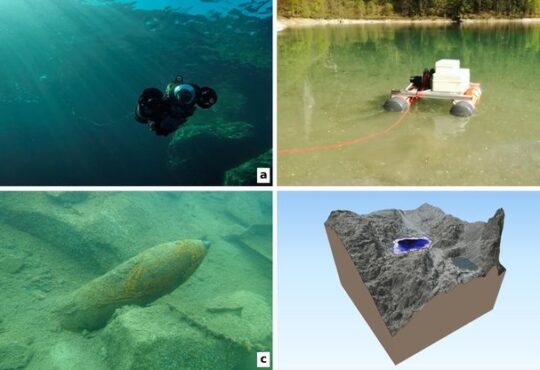
Teleoperare un robot umanoide vuol dire riuscire a fargli imitare il movimento umano. Questo apre un mondo di possibilità per la ricerca: per esempio, invece di mettere a rischio la salute di un umano, si può pensare di inviare un robot ad agire in tutte quelle situazioni dove sarebbe pericoloso, difficile, costoso andare (una piattaforma petrolifera in mezzo all’oceano, l’interno di una centrale chimica, l’interno di sottomarini o navi).
Il robot diventa un avatar, che dà il corpo e la capacità fisica di interagire con il mondo circostante mentre la capacità cognitiva di prendere decisioni o adattarsi alle situazioni rimane nelle mani dell’umano.
La difficoltà sta nel riuscire a ottimizzare il controllo sull’umanoide in modo che possa agire in maniera robusta, senza rompersi o rompere ciò che lo circonda, che stia in equilibrio e si muova senza cadere. Per esempio, un grosso problema dei robot umanoidi è proprio l’equilibrio, perché non hanno né le ruote né quattro zampe come i robot più classici.
Che informazioni usate per “insegnare” al robot come muoversi?
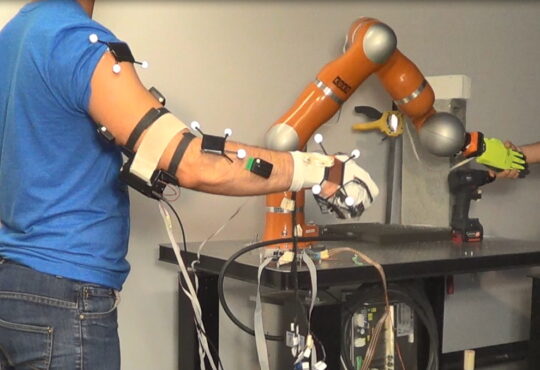
Le nostre ricerche sugli umanoidi hanno una controparte umana, nel senso che prima studiamo il movimento negli umani e poi cerchiamo di modellizzare l’azione umanoide. A tal fine sfruttiamo una serie di sistemi multi-sensore ed esoscheletri, simili ai dispositivi indossabili già in uso per per migliorare le prestazioni fisiche di chi li indossa o come dispositivi di supporto.
I sistemi che abbiamo in laboratorio sono speciali perché possiedono sensori, strutture meccaniche, algoritmi di machine learning e altre strategie di controllo grazie alle quali riusciamo ad acquisire informazioni su come viene eseguita una certa funzione motoria.
In questo modo riusciamo a ricostruire la cinematica, la postura, lo sforzo necessario per compiere un movimento. E ciò è utile non solo a livello di dato informativo, ma anche nel caso in cui si vuole creare un’interazione collaborativa tra umano e umanoide (qui un video esemplificativo). Immaginiamo di voler usare un robot per aiutarci a svolgere un certo compito: sapere lo stato di fatica dell’umano permette di programmare il movimento umanoide affinché si adatti alle esigenze umane, massimizzi il comfort ergonomico, alleggerisca il carico, minimizzi il rischio di pericolo, danno, infortunio.
Come si programma un umanoide?
Ci sono degli algoritmi di controllo, ottimizzazione e machine learning che traducono in linguaggio-macchina tutte le informazioni raccolte dagli studi sull’umano. Stiamo lavorando per ottimizzare questi sistemi in modo da migliorare il controllo dell’interazione uomo-robot e minimizzare il ritardo di comunicazione tra l’input umano e il feedback del robot (qui un video di approfondimento).
Il punto chiave per il controllo dell’interazione è riuscire a predire le intenzioni dell’umano. Capire cosa vuol fare l’uomo, come lo vuole fare e come il robot può farlo assieme a lui non è semplice, non tanto dal punto di vista del movimento quanto della percezione aptica, cioè dello scambio di forze tra robot e umano.
L’interazione tra umano e umanoide è come una danza: all’inizio il robot non fa esattamente le cose desiderate, ma l’uomo pian piano capisce cosa aspettarsi, impara a rispondere e si adatta. Se il robot fa sempre la stessa cosa, l’uomo può fare predizioni sempre più consistenti che gli permettono di adattarsi sempre più facilmente. Se il robot ogni volta cambia movimento, la predizione umana è più difficile. Ma chi si deve adattare a chi? L’uomo si adatta a tutto, ma se il robot è pensato con funzione di assistenza, allora deve essere in grado di agevolare un’azione, non di complicarla.
In fase di programmazione, perciò, è importante costruire un algoritmo che genera movimenti semplici da predire e che, allo stesso tempo, permetta al robot di adattarsi ai cambiamenti e alle reazioni umane, facilitandole. Questo è un problema complicatissimo, affascinante ma complicatissimo.
Prospettive future del tuo lavoro?
Stiamo cercando di declinare la predizione dell’interazione uomo-macchina a vari livelli, sia con robot semplici sia umanoidi sia esoscheletri, e di ridurre il ritardo. Il ritardo rende la predizione molto più complicata.
Il sogno futuro è avere un robot teleoperato a distanza da usare nell’esplorazione spaziale, andare sulla Luna o su Marte con un robot. Nel caso di Marte non è fattibile, il ritardo è troppo elevato, ma l’obiettivo Luna non è così fantascientifico.
Leggi anche: Quando il computer diventa uno strumento musicale
Articolo pubblicato con licenza Creative Commons Attribuzione-Non opere derivate 2.5 Italia. ![]()